Encoder
A categoria de encoder permite a leitura da posição angular dos motores.
Blocos
Exemplo - Retornando a posição do motor
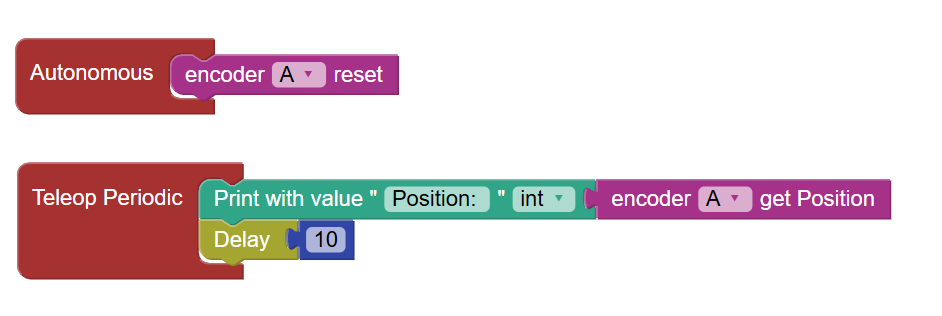
- O código acima faz as seguintes ações:
- Reseta a posição do encoder para 0;
- Mostra a posição do encoderA no monitor serial;
- Espera 10 milisegundos;
informação
O delay é utilizado apenas com o propósito de não avolumar dados no monitor serial.
Descrição dos blocos
Selecionando um encoder
Todos os blocos de encoder permitem que você selecione a porta da Easy Board que você queira.
getPosition
Este bloco retorna a posição angular do motor em ticks.

invertDirection
Este bloco inverte a direção de contagem do encoder, é necessário passar um valor Lógico para o bloco.

reset
Este bloco zera a contagem do encoder.
