IMU
informação
A Easy Board possui um sensor de medição inercial embarcado. E a presente categoria permite que façamos a leitura desse dispositivo, o qual deve retornar a orientação da placa em X, Y e Z.
Exemplo
Lendo a posição angular da placa
Execute o código e verifique o valor do IMU na telemetria.
- Blocos
- Texto
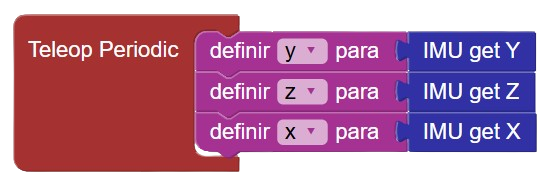
#include "user.hpp"
double y;
double z;
double x;
void autonomous() {
}
void teleopPeriodic() {
y = IMU::getPitch();
z = IMU::getYaw();
x = IMU::getRoll();
}
Descrição das Funções
getZ
Este bloco retorna a orientação no eixo Z do IMU.
- Blocos
- Texto

IMU::getYaw();
getX
Este bloco retorna a orientação no eixo X do IMU.
- Blocos
- Texto

IMU::getRoll();
getY
Este bloco retorna a orientação no eixo Y do IMU.
- Blocos
- Texto

IMU::getPitch();