Servos
informação
A categoria de servos permite o controle dos Servos Inteligentes.
Exemplo
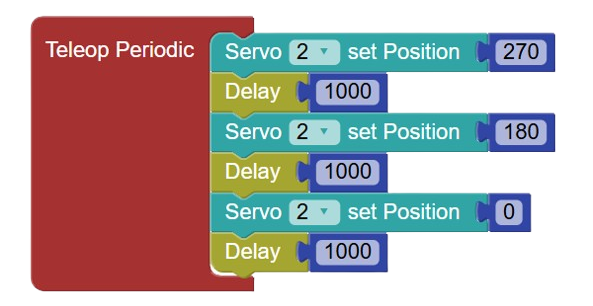
Definindo uma posição para o servo
- Blocos
- Texto
#include "user.hpp"
EasyServo servo2 = EasyServo(ServoPorts::Port::PORTA_2);
void autonomous() {
}
void teleopPeriodic() {
servo2.setPosition(270);
delay(1000);
servo2.setPosition(180);
delay(1000);
servo2.setPosition(0);
delay(1000);
}
- O presente código tem como objetivo:
- Mover o servo 2, para 270º;
- Aguardar 1 segundo;
- Mover o servo 2 para a posição 180º;
- Aguardar 1 segundo;
- Voltar o servo 2 para a posição 0º;
- Aguardar 1 segundo.
Descrição das Funções
setPosition
Define uma posição para o servo, variando de 0º até 270º.
- Blocos
- Texto

servo1.setPosition();
getPosition
Retorna a última posição do servo.
- Blocos
- Texto
servo1.getPosition();