Motor
informação
Utilize esta categoria para movimentar motores.
Exemplo
Girando um motor
- Blocos
- Texto
#include "user.hpp"
Motor motor1 = Motor(Motor::PORTA_1);
void autonomous() {
motor1.setPower(1);
delay(2000);
motor1.setPower(0.3f);
delay(2000);
motor1.setPower(-0.5f);
delay(2000);
}
void teleopPeriodic() {
}
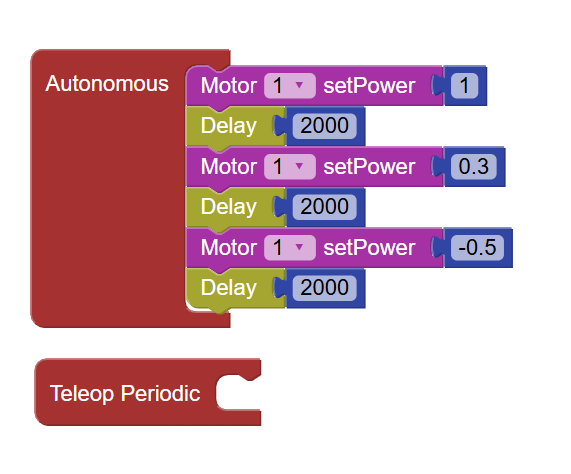
- O código acima realiza as seguintes ações:
- Define a saída do motor 1 para a máxima possível;
- Aguarda 2 segundos;
- Reduz a saída do motor 1 para 30%;
- Aguarda 2 segundos;
- Inverte o sentido do motor 1 e coloca a velocidade em 50%;
- Aguarda 2 segundos.
Descrição dos blocos
setPower
Define uma velocidade para o motor, com um valor de entrada númerico que pode variar de -1.0 até 1.0
- Blocos
- Texto

motor1.setPower(1);
getPower
Retorna a última velocidade enviada para o motor, com valores númericos de saída que podem variar de -1.0 até 1.0
- Blocos
- Texto

motor1.getPower();