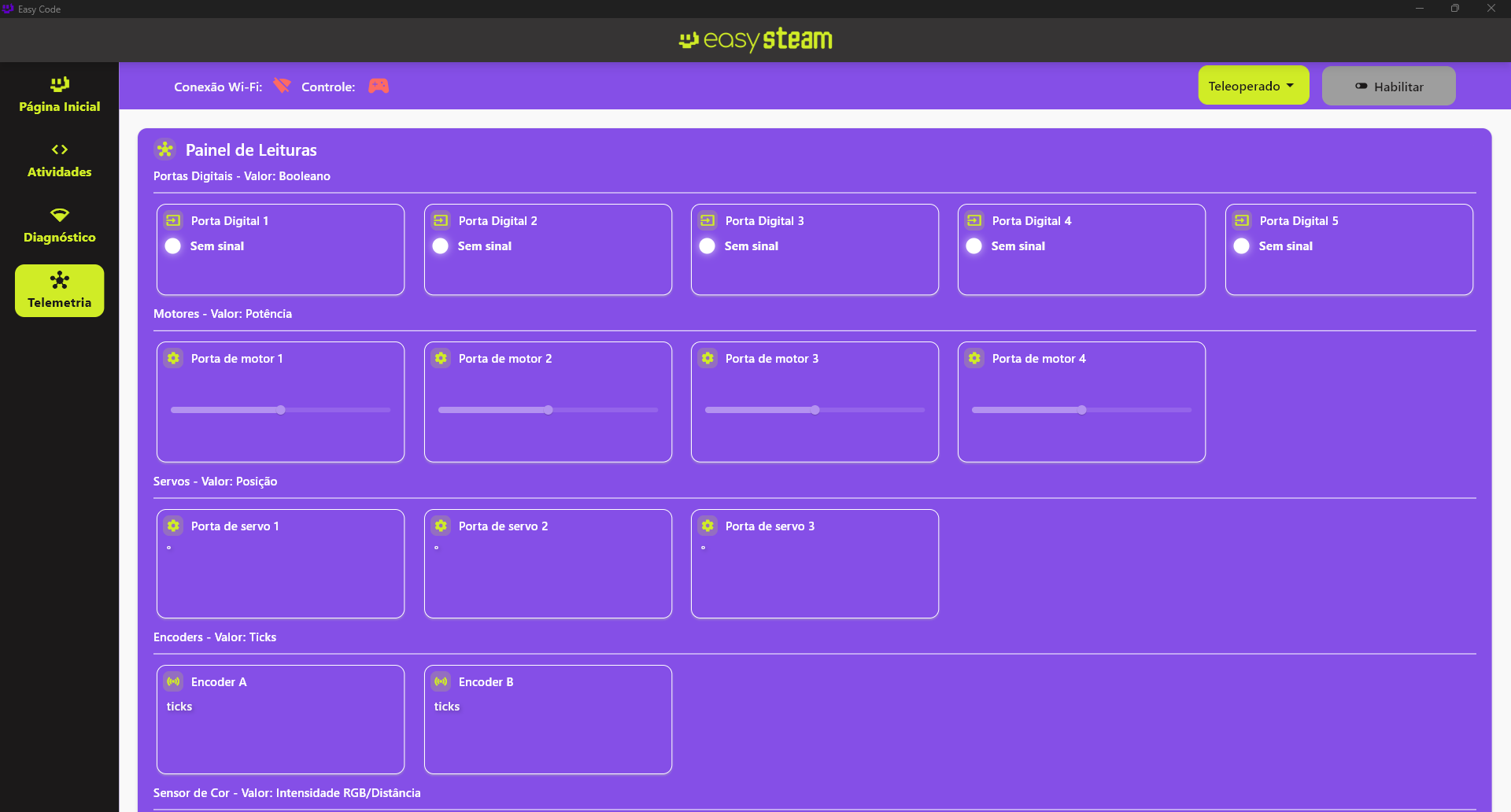
Página de Telemetria
Esta é a página de Telemetria do Easy Code.
O que é Telemetria?
A telemetria é uma forma de mensurar e acompanhar remotamente dados ou indicadores em tempo real. No caso do Sistema Easy Steam é a maneira que utilizamos para verificar os dados provenientes de um atuador ou sensor.
Quais são os dados que podemos monitorar no Easy Code?
No Easy Code temos uma variedade de dados que podem ser monitorados, abaixo temos a lista de atuadores e sensores além de uma breve descrição sobre o que é medido em cada caso:
A página de telemetria só fornecerá os dados dos componentes conectados a Easy Board e que estão sendo utilizados na programação.
- Portas digitais: As portas digitais utilizam valores booleanos, então o valor fornecido será Verdadeiro ou Falso.
- Portas de motor: As portas de motor forneceram os valores da potência que está sendo aplicada ao motor e em que direção, os valores são representados tanto pelo slider quanto pelo valor que pode variar entre -1 e 1
- Portas de servo: As portas de servo irão fornecer a posição do servo em graus (°).
- Portas de encoder: As portas de encoder mostrarão a posição dos encoders em ticks.
- Sensor de cor: O sensor de cor irá fornecer a intensidade de cada cor no espectro RGB e a distâcia do objeto em centímetros (cm).
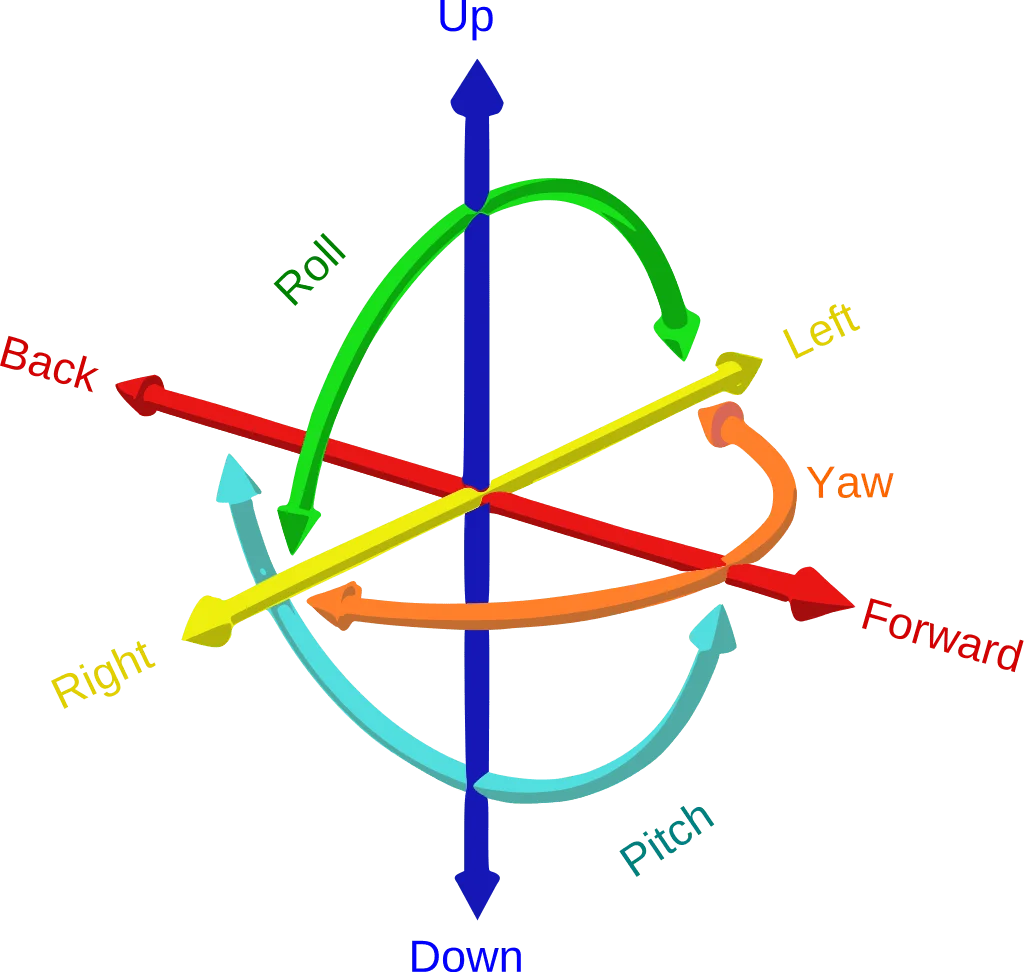
- Sensor IMU: O sensor IMU fornecerá os valores de Pitch, Roll e Yaw em graus (°).
Além de fornecer todos os dados citados anteriormente também podemos imprimir mensagens de texto no Easy Code através do campo de Mensagem.
Entendendo o sensor de cor
O sensor de cor utiliza da mistura das cores vermelho (Red), verde (Green) e azul (Blue) para representar outras cores, dessa forma ao ler uma cor como branco por exemplo temos como resultado 255 em todos os indicadores pois a soma de todas as cores é branco.
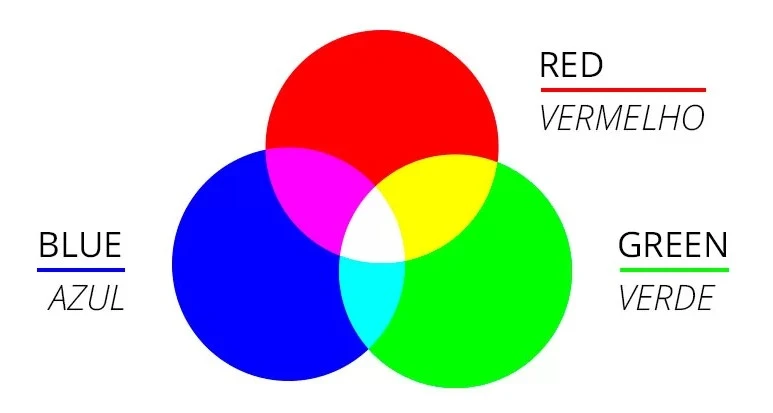
Ao ler a cor preto teremos como resultado 0 em todos os indicadores, pois preto representa a ausência de cores.
Ao realizarmos uma leitura de uma cor os valores podem variar dependento da emissão de luz sobre o local da leitura e a distâcia do sensor do objeto. Ao ler a cor roxo o resultado deve ser algo como R:157 G:0 e B:255, porém também podemos ter como resultado todos os itens listados abaixo, a diferença entre os valores serão referentes ao tom da cor lida:
- R:100 G:50 B:150 (Roxo)
- R:255 G:0 B:255 (Rosa)
- R:100 G:0 B:150 (Roxo escuro)
- R:100 G:50 B:150 (Roxo azulado)
Entendendo o sensor IMU
Pitch (Inclinação), Yaw (Guinada) e Roll (Rotação) são as três dimensões do movimento quando um objeto se desloca através de um meio.
Os termos podem ser usados para descrever os movimentos de um avião pelo ar. Eles também são aplicados a embarcações que se movem na água e a espaçonaves que se movem pelo espaço.
E no caso da Easy Board se referem ao sensor IMU embutido.
Existem, na verdade, seis graus de liberdade de um corpo rígido que se move no espaço tridimensional.
Como o movimento ao longo de cada um dos três eixos é independente um do outro e independente da rotação em torno de qualquer um desses eixos, o movimento possui seis graus de liberdade.